Der Temperaturverlauf in der Umgebung eines Kontaktbereiches wird mithilfe des nachfolgenden Modellproblems analysiert (1D-Interface Problem). Für die numerische Lösung der heat equation in komplizierten 3-D-Geometrien lassen sich hiermit Rückschlüsse zur Auflösung des evtl. großen Temperaturgradienten (Feinheit des Gitters im Kontaktbereich) bzw. zur Konstruktion von Ansatzfunktionen fürs XFEM-Verfahren gewinnen.
Das Modellproblem
Zwei, jeweils einseitig unendlich ausgedehnte Körper mit verschiedenen Anfangstemperaturen, berühren sich bei \(x=0\). In beiden Gebieten gilt die Wärmeleitungsgleichung:
$$
\frac{\partial}{\partial t} T_1(x,t) = a_1 \, \frac{\partial^2 T_1 (x,t)}{\partial x^2}, \qquad \text{mit}
\qquad T_1(x,0) = T_{1}, \quad T_1(-\infty,t) = T_1, \quad x < 0, \quad t > 0,
$$
und
$$
\frac{\partial}{\partial t} T_2(x,t) = a_2\, \frac{\partial^2 T_2(x,t)}{\partial x^2} \qquad \text{mit}
\qquad T_2(x,0) = T_{2}, \qquad T_2(\infty,t) = T_2, \quad x >0, \quad t >0.
$$
mit den Temperaturleitfähigkeiten
$$
a_i = \frac{\lambda_i}{\rho_i \, c_i} \quad \left[ \frac{m^2}{s} \right] , \quad i=1,2 .
$$
Die Kontaktbedingungen für \(x=0\) sind
$$
T_1(0,t) = T_2(0,t) \quad \text{ und } \quad \lambda_1 \, \frac{\partial T_1}{\partial n} (0,t)= \lambda_2 \, \frac{\partial T_2}{\partial n}(0,t) .
$$
Geschlossene Lösung
Einsetzen der Ansatzfunktionen, die beide die Wärmeleitungsgleichung erfüllen,
$$
T_1(x,t) = A_1 + \, B_1 \, {\rm erf} \left( \frac{-x}{\sqrt{4\, a_1 \,t}}\right) , \quad x < 0 $$ und $$ T_2(x,t) = A_2 + \, B_2 \, {\rm erf} \left( \frac{x}{\sqrt{4\, a_2 \,t}}\right) , \quad x > 0.
$$
in die Kontaktbedingungen ergibt die Lösung
$$
T_1(x,t) = T_C \, + \, \frac{ \beta_{2}}{\beta_{1} + \beta_{2}} \, {\left(T_{1} – T_{2}\right)} \, {\rm erf} \left( \frac{-x}{\sqrt{4\, a_1 \,t}}\right) , \quad x < 0, \; t>0
$$
auf der negativen Halbachse und für \(x>0\)
$$
T_2(x,t) = T_C \, – \, \frac{ \beta_{1}}{\beta_{1} + \beta_{2}} \, {\left(T_{1} – T_{2}\right)} \, {\rm erf} \left( \frac{x}{\sqrt{4\, a_2 \,t}}\right) , \quad x > 0, \; t>0 .
$$
Die zeitunabhängige Kontakttemperatur ist \(T_C\):
\begin{equation} \label{Tc}
T_C= \frac{T_{1} \beta_{1} + T_{2} \beta_{2}}{\beta_{1} + \beta_{2}} =
T_{1} + \frac{\beta_{2}}{ \beta_{1} + \beta_{2} } \left( T_{2} – T_{1}\right) .
\end{equation}
Die Materialkonstanten
$$
\beta_i:= \sqrt{\lambda_i \, \rho_i \, c_i} \quad \left[ \frac{J}{K \, m^2 s^{1/2}} \right] , \quad i=1,2
$$
werden als Wärmeeindringkoeffizienten (thermal effusivity) bezeichnet.
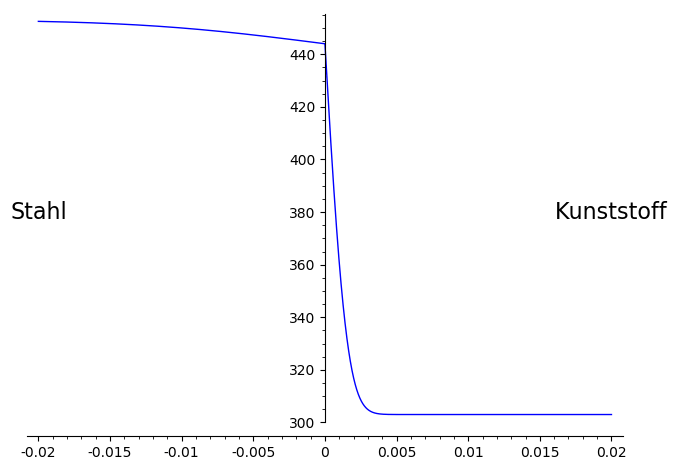
Kontakt zwischen Stahl und Kunststoff
Als Beispiel zum 1D-Interface-Problem betrachten wir die Materialien Stahl (linker Körper) und Kunststoff (rechts).
Materialdaten.
Stahl (links):
\[
\lambda_1=40\;\frac{\rm W}{\rm m\,K},\quad
\rho_1=7850\;\frac{\rm kg}{\rm m^3},\quad
c_1=480\;\frac{\rm J}{\rm kg\,K},\quad
a_1=1.0615\cdot 10^{-5}\;\frac{\rm m^2}{\rm s}.
\]
Kunststoff (rechts):
\[
\lambda_2=0.3\;\frac{\rm W}{\rm m\,K},\quad
\rho_2=1700\;\frac{\rm kg}{\rm m^3},\quad
c_2=1200\;\frac{\rm J}{\rm kg\,K},\quad
a_2=1.4706\cdot 10^{-7}\;\frac{\rm m^2}{\rm s}.
\]
Damit folgen \(\beta_1=12276.80\) und \(\beta_2=782.30\).
Anfangstemperaturen. Wir setzen \(T_1=453\,{\rm K}\) (Stahl) und \(T_2=303\,{\rm K}\) (Kunststoff). Folglich ergibt sich
\[
T_C = 444.014\;{\rm K}.
\]
Interpretation und Nutzen
- Steiler Gradient am Interface. Direkt an \(x=0\) ist der Temperaturanstieg hoch. Daher sollte das Netz lokal stark verfeinert werden.
- Skalenabschätzung. Die diffusive Eindringtiefe wächst wie \(\sqrt{a_i t}\). Somit bestimmt \(a_i\) die sinnvolle Gitterweite.
- XFEM-Hinweis. Die Fehlerfunktion \({\rm erf}(\cdot)\) liefert eine geeignete enrichende Ansatzfunktion. Dadurch lässt sich der Gradient ohne extreme Netzverfeinerung abbilden.
Physikalische Bedeutung der thermischen Eindringtiefe
Die charakteristische Längenskala des Problems ergibt sich unmittelbar aus der Struktur der Lösung. Der dimensionslose Ausdruck
\[
\frac{x}{\sqrt{4 a_i t}}
\]
zeigt, dass sich Temperaturänderungen in einem rein diffusionsdominierten Prozess nicht mit konstanter Geschwindigkeit ausbreiten, sondern mit einer diffusionstypischen \(\sqrt{t}\)-Skalierung. Die Größe
\[
\ell_i(t) \sim \sqrt{a_i\,t}
\]
beschreibt daher die typische thermische Eindringtiefe, also den Bereich, in dem sich das Temperaturfeld signifikant gegenüber dem Anfangszustand verändert. Außerhalb dieser Zone bleibt die Temperatur näherungsweise unverändert.
Für numerische Verfahren bedeutet das: Unabhängig von der globalen Geometrie entscheidet allein diese lokale Skalenlänge darüber, wo eine feine räumliche Auflösung notwendig ist. Die Wärmeleitung erzeugt eine zeitabhängige Randschicht am Kontakt, deren Dicke mit \(\sqrt{t}\) anwächst.
Insbesondere on der Anfangsphase ist diese Schicht extrem dünn. Eine uniforme Gitterverfeinerung wäre daher ineffizient. Stattdessen ist eine lokale Verfeinerung im Kontaktbereich oder der Einsatz angereicherter Ansatzfunktionen (z. B. XFEM) die numerisch saubere Strategie.
SageMath-Script
Der Temperaturverlauf für \(t=5 \, s\) ist in der obigen Abbildung dargestellt und kann mithilfe eines SageMath-Scripts berechnet werden (mehr Informationen zu SageMath und seiner Nutzung findet sich hier)
Bezug zu Kontaktproblemen mit Reibung
Das betrachtete 1D-Interface-Problem beschreibt zunächst einen rein thermischen Kontakt ohne interne Wärmequellen.
In realen Kontaktproblemen – etwa bei Gleit- oder Reibkontakten – tritt jedoch zusätzlich eine lokalisierte Wärmeerzeugung am Interface auf.
Typischerweise wird die Reibwärme durch einen Flächenleistungsdichte-Term
\[
q_{\mathrm{fric}} = \mu \, p \, v
\]
beschrieben, wobei \(\mu\) der Reibkoeffizient, \(p\) der Kontaktdruck und \(v\) die Relativgeschwindigkeit ist. Diese Wärmequelle wirkt räumlich hochkonzentriert im Kontaktgebiet und zeitlich oft stark transient.
Thermisch gesehen führt dies zu einer Überlagerung zweier Effekte: einerseits der Kontaktbedingung mit Wärmestromkontinuität, andererseits einer punkt- oder flächenförmig eingebrachten Wärmequelle. Die resultierenden Temperaturfelder zeigen daher noch steilere Gradienten als im rein diffusionsgetriebenen Fall.
Gerade in solchen Reibkontakten ist die thermische Eindringtiefe \(\ell_i(t)\sim\sqrt{a_i t}\) entscheidend:
Sie bestimmt, in welchem Volumen die Reibwärme tatsächlich wirksam wird und wie stark sich Temperaturspitzen ausbilden. Materialien mit geringer Temperaturleitfähigkeit (z. B. Kunststoffe oder Beschichtungen) zeigen dabei deutlich höhere lokale Temperaturen als metallische Gegenkörper.
Für numerische Simulationen von thermo-mechanischen Kontaktproblemen bedeutet das: Die Kopplung von Kontaktmechanik, Reibung und Wärmeleitung führt zwangsläufig zu stark lokalisierten thermischen Randschichten. Das hier diskutierte 1D-Interface-Problem liefert daher eine wichtige Referenzlösung, um Gitteranforderungen, Stabilität und Enrichment-Strategien
in komplexen 3D-Kontaktsimulationen abzuschätzen.