Die Kettenlinie ist die Lösung eines statischen Gleichgewichtsproblems für eine hängende Kette unter Eigengewicht. Die zugehörige ODE beschreibt die lokale Gleichgewichtsbedingung. SageMath erlaubt anschließend die numerische Auswertung konkreter Geometrien.
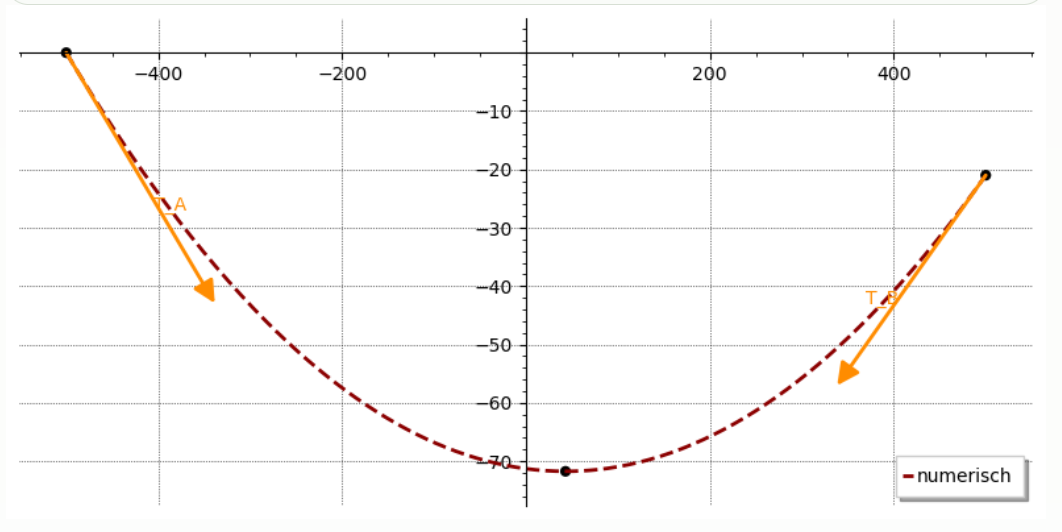
Unsymmetrische numerische Lösung bei einer vorgegebenen Seillänge S=1020 m und einem Höhenversatz der Auflager von b=42 m.
ODE
Aus dem Kräftegleichgewicht folgt eine nichtlineare Differentialgleichung zweiter Ordnung.
Lösung
Die Kettenlinie ist die geschlossene Lösung dieser ODE.
Numerische Lösung
Die Kettenlinie dient hier als Referenzfall für ein numerisches Verfahren, das sich auch auf komplexere Seilprobleme ohne analytische Lösung übertragen lässt.
SageMathCell
Für konkrete Daten wird der Formparameter a numerisch bestimmt und der Vergleich direkt geplottet.
1) Modellannahmen
Wir betrachten eine homogene, flexible und inkompressible Kette mit konstanter Linienlast w pro Bogenlänge. Biegemomente werden vernachlässigt. Die innere Kraft wirkt nur tangential entlang der Kette. Die Kurve sei als y = y(x) beschrieben. Die horizontale Komponente der Zugkraft wird mit H bezeichnet und ist entlang der Kette konstant.
Diese Linienlast ist die Gewichtskraft pro Meter Seillänge: w = μg, mit der Masse pro Meter μ in kg/m und g ≈ 9.81 m/s². Für ein reales Stahlseil hängt μ von Durchmesser und Konstruktion ab. Herstellerangaben für Seile um 16 mm liegen grob bei 0.97 bis 1.05 kg/m für 6×19- beziehungsweise 6×36-Seile. Das entspricht etwa 9.5 bis 10.3 N/m. Im Demo-Modell setze ich daher w = 10 N/m als plausiblen Realwert an.
Zusätzlich kann im interaktiven Modell eine gleichmäßig verteilte Eisauflast berücksichtigt werden. Sie wird über
eine Eisdicke t_eis vorgegeben und als Zusatz zur Seillinienlast angesetzt. Für das Beispiel wird ein Seildurchmesser von 16 mm verwendet. Damit ergibt sich insgesamt die Linienlast w_ges = w_seil + w_eis.
\[
A_{eis} = \pi(r_{out}^2-r_{in}^2), \qquad
w_{eis} = \rho_{eis}\,g\,A_{eis}
\]
Hier ist A_eis die Ringfläche der Eisschicht um das Seil. Mit r_in = d_seil/2 und r_out = d_seil/2 + t_eis ergibt sich daraus die zusätzliche Linienlast der Vereisung.
2) ODE der Kettenlinie
Aus dem lokalen Kräftegleichgewicht eines kleinen Seilstücks folgt, dass die vertikale Kraftkomponente mit der Bogenlänge wächst, während die horizontale Komponente H konstant bleibt. Über den Zusammenhang zwischen Bogenlänge und Steigung ergibt sich damit die ODE
\[ y”(x) = \frac{1}{a}\sqrt{1+y'(x)^2}. \]
mit dem Formparameter a = H/w. Die genaue Herleitung ist klassischer Stoff der Technischen Mechanik. Wichtiger ist hier die Aussage der Gleichung: Die Krümmung der Kette ist nicht konstant, sondern über die Steigung y'(x) nichtlinear mit der lokalen Geometrie gekoppelt.
3) Geschlossene Lösung
Die Lösung der ODE ist die Kettenlinie
\[ y(x) = a \cosh\!\left(\frac{x-x_0}{a}\right) + y_0. \]
Damit ergibt sich die Kettenlinie als Lösung des statischen Modells. Die Konstanten x_0 und y_0 beschreiben die Lage des Tiefpunkts, während a direkt mit der horizontalen Zugkraft verknüpft ist.
4) Bestimmung von a aus L, b und S
Für eine reale Geometrie ist a in der Regel nicht direkt gegeben. Stattdessen werden Spannweite L, Höhendifferenz b der Auflager und Seillänge S vorgegeben. Dann ist die Kettenlinie eindeutig bestimmt.
Der Formparameter a folgt aus der skalaren nichtlinearen Gleichung
\[ \sqrt{S^2-b^2} = 2a\,\sinh\!\left(\frac{L}{2a}\right). \]
Diese Gleichung ist genau dann lösbar, wenn die Seillänge größer ist als der direkte Abstand der Auflager,
\[ S > \sqrt{L^2+b^2}. \]
Danach folgt die horizontale Lage des Tiefpunkts aus
\[ x_0 = a\,\operatorname{arsinh}\!\left(\frac{b}{2a\,\sinh(L/(2a))}\right) \]
und aus der Auflagerbedingung ergibt sich dann die Höhe des Tiefpunkts.
5) Numerisches Verfahren
Für die praktische Berechnung ist die numerische Lösung der eigentliche zentrale Schritt. Im vorliegenden Spezialfall ist die exakte Kettenlinie zwar bekannt und dient als Referenz, aber in allgemeineren Situationen gibt es oft keine geschlossene Lösung. Dann muss die Kurve direkt aus dem Anfangswert- oder Randwertproblem numerisch bestimmt werden. Die hier gezeigte Integration ist deshalb nicht nur ein Kontrollbeispiel, sondern das Verfahren, das auch für reale Geometrien und erweiterte Modelle gebraucht wird.
Man schreibt die DGL zweiter Ordnung als System erster Ordnung:
\[ y’ = v,\qquad v’ = \frac{1}{a}\sqrt{1+v^2},\qquad y(0)=0,\quad v(0)=0. \]
Das numerische Ergebnis y_num(x) wird dann direkt mit der exakten Kettenlinie y_exakt(x)=a(cosh(x/a)-1) verglichen. Im Mittelpunkt steht dabei die numerische Lösung, während die analytische Kettenlinie als Kontrolle dient. Zugleich sieht man, dass die Kräfte stark anwachsen, sobald sich S der geometrischen Mindestlänge nähert.
6) SageMathCell für Berechnung und Plot
Die folgende Zelle enthält den SageMath-Code direkt im Standardformat von SageCell. Das Skript arbeitet mit drei Slidern: einer für die vorgegebene Seillänge S, einer für die Höhendifferenz b der Auflager und einer für die Eisdicke t_eis. Für jedes Wertepaar werden der Formparameter a, die horizontale Zugkraft H und die Lage des Tiefpunkts numerisch bestimmt. Zum Vergleich mit der analytischen Lösung ist die exakte Kettenlinie im Code ebenfalls enthalten. Die vertikale Lage ist so normiert, dass der linke Auflagepunkt bei y=0 liegt. Dadurch ist der ausgegebene Durchhang direkt ablesbar und nicht durch einen künstlichen Höhenoffset verfälscht.
Das Skript macht damit zwei Dinge gleichzeitig: Es bestimmt aus den Randdaten zuerst den Formparameter a und verwendet diesen danach für die numerische Lösung.
Die Eislast wirkt in diesem Modell als zusätzliche gleichmäßig verteilte Linienlast. Bei vorgegebener Seillänge S und Höhendifferenz b verändert sie daher vor allem das Kraftniveau, während die Geometrie der Kettenlinie in diesem vereinfachten Ansatz gleich bleibt.
Zur Ausgabe: A und B sind die Auflagerhöhen im gewählten Koordinatensystem, b ist ihre Höhendifferenz, H die horizontale Seilkraft, |F_A| und |F_B| sind die resultierenden Auflagerkräfte, x_0 ist die horizontale Lage des Tiefpunkts und y_min dessen Höhe. Die Kraftangaben werden in kN ausgegeben, weil Newton bei dieser Spannweite unnötig kleinteilig sind.
Die geometrische Untergrenze ist nicht pauschal 1000 m, sondern S_min = sqrt(L^2 + b^2). Für L=1000 m gilt also nur im symmetrischen Fall b=0 die Grenze S_min=1000 m. Außerdem wird das obere Intervallende vor dem Aufruf von find_root automatisch vergrößert, bis ein Vorzeichenwechsel vorliegt.
Der numerische Fehler ist in diesen Beispielen sehr klein, typischerweise nahe der Maschinenpräzision. Der Beispielplot zeigt die Fehlergröße zusätzlich auf logarithmischer Skala.
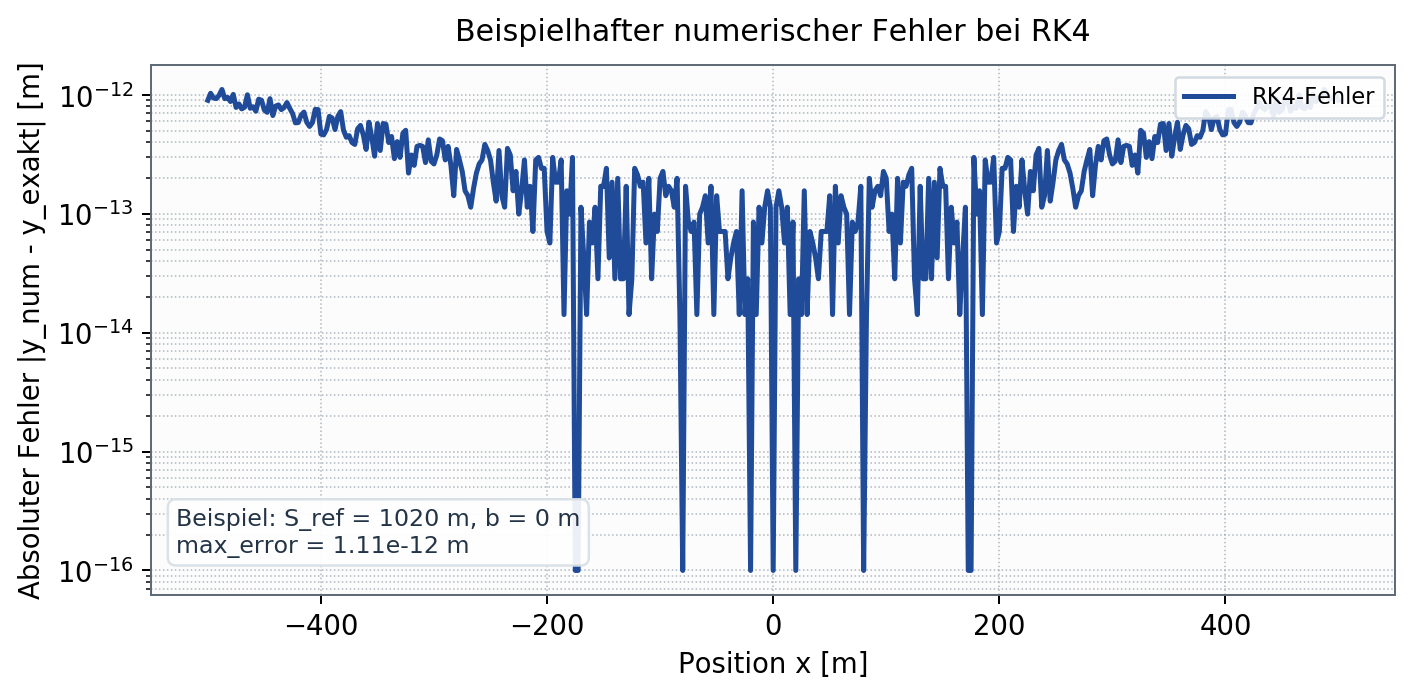
Beispiel für den numerischen Kontrollfehler bei S=1020 m und b=0. Die logarithmische y-Achse zeigt, dass der Fehler im Bereich von etwa 10^-12 m liegt.
7) Größenordnung und Grenzen
Als Beispiel wird eine unsymmetrische Geometrie mit 1000 m Spannweite, 1020 m Seillänge und 42 m Höhendifferenz der Auflager verwendet. Das ist eine sinnvolle Größenordnung für die numerische Auswertung, auch wenn damit die real Seilgeometrie noch nicht vollständig festgelegt ist.
Die dargestellte Kettenlinie ist ein reduziertes statisches Modell. Sie ist sehr nützlich, um Geometrie, Zugkraftniveau und qualitative Abhängigkeiten zu verstehen, bildet aber reale Seile oder Ziplines nicht vollständig ab. Berücksichtigt sind hier das Eigengewicht des Seils und optional eine gleichmäßig verteilte Eisauflast. Nicht berücksichtigt sind dagegen Temperaturdehnung, Windauflast, Biegesteifigkeit, Reibung in Rollen oder Auflagern sowie dreidimensionale Effekte. Für Freileitungen, Ziplines oder Mooring-Systeme ist das nur ein erster Schritt. Belastbare Auslegungen brauchen meist ein erweitertes nichtlineares Modell.
Keine Dehnung
Das Seil wird als inextensibel modelliert. Elastische Dehnung unter Last ist nicht enthalten.
Eigengewicht + Eislast
Berücksichtigt sind die gleichmäßig verteilte Linienlast des Seils und optional eine vereinfachte Eisauflast.
Keine Punktlasten
Hängende Massen wie Gondeln, Personen, Laufkatzen oder Zusatzgewichte sind nicht modelliert.
Keine Dynamik
Schwingungen, Anfahren, Bremsen, Wind und andere zeitabhängige Lasten sind nicht enthalten.
Derselbe Problemtyp taucht in Freileitungen, Spannfeldern, Mooring-Elementen, Ankerketten und allgemein in vereinfachten Modellen flexibler Zugglieder auf. Dadurch ist das Thema sowohl mathematisch sauber als auch technisch anschlussfähig. Eine gut lesbare, frei zugängliche Darstellung der Herleitung findet sich bei Jeremy Tatum: Physics LibreTexts: The Catenary.
8) Ausblick: elastische Seillinie
Ein nächster modelltechnischer Schritt ist die elastische Dehnung des Seils. Dann ist die Seillänge nicht mehr rein geometrisch fest, sondern von der Zugkraft abhängig. Die klassische Kettenlinie mit ihrer cosh-Struktur ist dann im Allgemeinen keine exakte Lösung mehr. Stattdessen muss die Seillinie aus einem gekoppelten nichtlinearen Gleichungssystem numerisch bestimmt werden.
Die folgende Abbildung zeigt genau diesen Vergleich: blau die elastische Seillinie, rot gestrichelt die inextensible Referenz. Beide Kurven verwenden dieselben äußeren Randdaten, unterscheiden sich aber durch das Materialmodell. Gerade bei großen Spannweiten und höherem Kraftniveau wird sichtbar, dass die elastische Lösung tiefer liegt und damit eine andere Durchhang-Kraft-Kopplung besitzt.
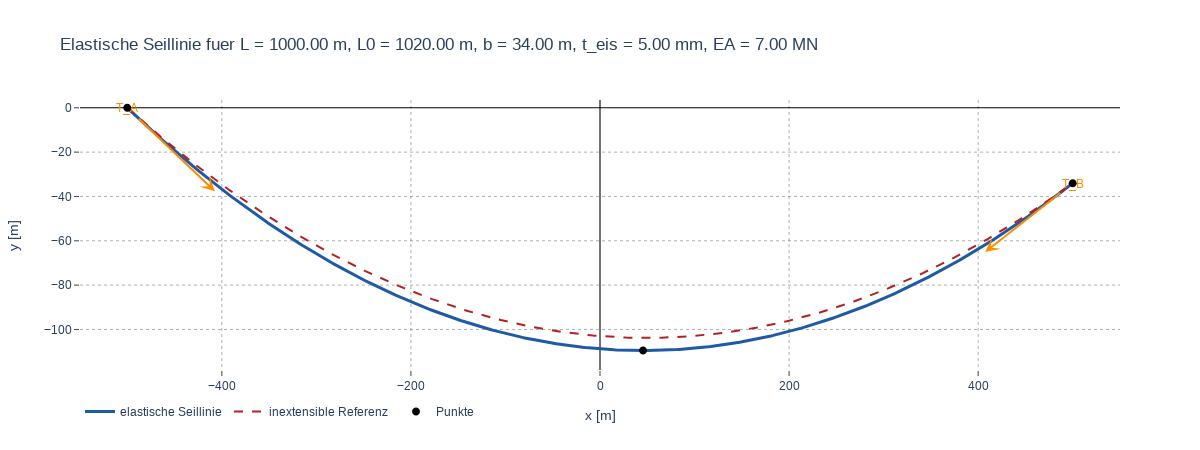
Das ist ein wichtiger Ausblick, weil reale Seile unter Last nicht vollkommen inextensibel sind. Das hier gezeigte elastische Modell ist noch bewusst einfach gehalten, markiert aber den Übergang von der klassischen Kettenlinie zu einem allgemeineren numerischen Seilmodell.